هکتور، ربات حشرهای اولین گام خود را برداشت
هکتور (Hector)، ربات ساخته شده با الهام از نوعی حشرهی چوبی توسط گروه تحقیقاتی در دانشگاه بیلهفلد آلمان در سال ۲۰۱۱ توسعه یافت که اخیرا به سختی مشغول یادگیری راه رفتن بوده است. انتظار میرود هکتور که به عنوان یک ربات عملیاتی خودکار شش پا شناخته میشود، نه تنها در زمینهی رباتیک تاثیرگذار باشد، بلکه در زمینهی بیولوژی نیز در نحوهی شناخت حرکت جانداران به دانشمندان کمک کند.
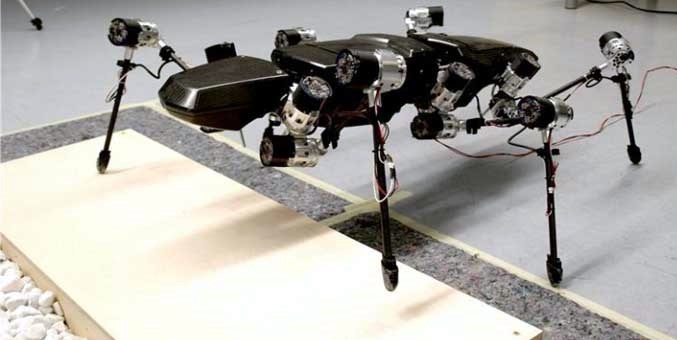
اغلب رباتهای شش پا تمایل به راه رفتن به وسیلهی سه پا یا یک پای ثابت را دارند. با این حال، هکتور دارای شیوهی راه رفتن آزادی است به این معنی که هر پای آن تصمیمات خاص خود را به تنهایی گرفته و مکان و زمان حرکتشان را تعیین میکنند. هکتور با استفاده از سنسورهای خود میتواند تشخیص دهد چگونه از موانع سادهای مانند یک مانع چوبی گذر کند.
هکتور که ایدهی ساخت آن از روی بدن یک حشرهی چوبی گرفته شده، دارای یک اسکلت بسیار نرم ساخته شده از پلاستیک فیبرکربن تقویت شده (CFRP) است. در کنار تعداد سنسورهای زیاد و دوربینهای کوتاه برد آن، این ربات منحصربفرد دارای ۱۸ مفصل الکتریکی انفعالی است که حرکت ماهیچه را شبیهسازی میکنند.
دکتر اکسل اشنایدر میگوید: “خاصیت کشسانی حرکت هکتور قابل مقایسه با شیوهی حرکت ماهیچهها در سیستمهای بیولوژیکی میباشد. با این حال، کشسانی به تنهایی برای هکتور جهت راه رفتن در یک محیط طبیعی پر از مانع کافی نیست. نکتهی مهم، توسعهی یک سیستم کنترل میباشد که بتواند حرکات پاهای این ربات را در محیطهای دشوار کنترل کند.”
جن پاسکاربیت، از محققان این پروژه میگوید: “تمامی زیرسیستمهای این ربات باید با یکدیگر همکاری و هماهنگی داشته باشند تا هکتور بتواند بدون مشکل خاصی راه برود. در غیر اینصورت، برای مثال ممکن است پاهای هکتور در هوا قرار گرفته، ثباتش را از دست بدهد و سقوط کند. علاوه بر این، پاها باید قادر به واکنش در برابر سقوط در مواجهه با موانع باشند. ما این مشکل را با پیادهسازی یک رفتار واکنشی برای صعود از اشیا، حل کردهایم.”
از این رو هکتور درست مانند یک حشره رفتار میکند و بهترین تصمیم ممکن را برای گذر از محیط میگیرد. محققان گفتهاند در آینده، هکتور همچنین میتواند بستری برای بیولوژیستها و مهندسان رباتیک فراهم آورد تا آنها تستها و تئوریهای خود در مورد حرکت حیوانات را بر روی این ربات انجام دهند.
یک نمونهی مجازی نیز این ربات ساخته شده تا بدون وارد آوردن خسارت به هکتور، آزمایشات خطرناک بر روی آن انجام گیرد. دانشمندان همچنین حرکت حشرات چوب واقعی را مورد مطالعه قرار دادهاند تا مکانیزمهای کنترل موجود در سیستم عصبی این نوع از حشرات را شناسایی و درک کرده و آنها را به مدلهای کامپیوتری تبدیل نمایند.
هکتور هنوز یک ربات ناکامل است، اما سازندگان آن سال ۲۰۱۷ را زمان کسب پیشرفتهای زیاد برای این ربات دانستهاند. این گروه پیش از این هم به توسعهی نمونهی آزمایشی با دو دوربین جانبی و دو حسگر لمسی ایجاد نمود و در حال حاضر مشغول کار بر روی اتصال سنسورهای دوربرد بر روی سر هکتور هستند.